原创
转载请注明出处,侵权必究。
1、前期准备
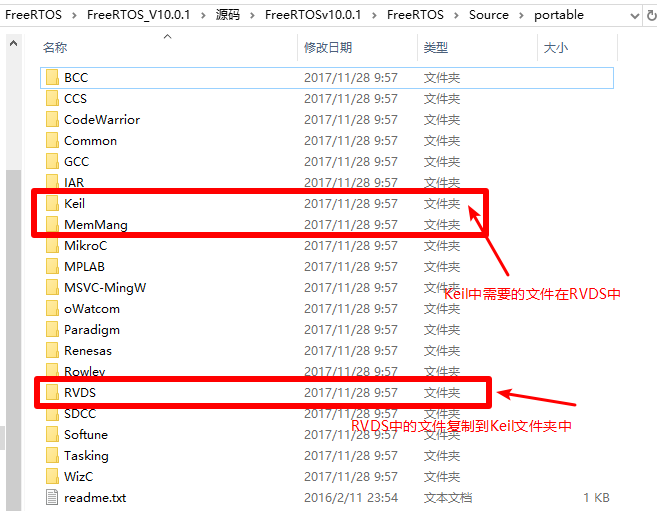
1、进入源码,FreeRTOS -> Source。
2、删除portable中不需要的文件。
RVDS和keil的文件相同,所以keil需要的文件只要从RVDS中复制即可。然后只保留keil和MemMang。
说明:使用V10.0.1的源码和V9.0.0的FreeRTOSConfig.h配置文件。
2、移植
2.1 添加FreeRTOS源码
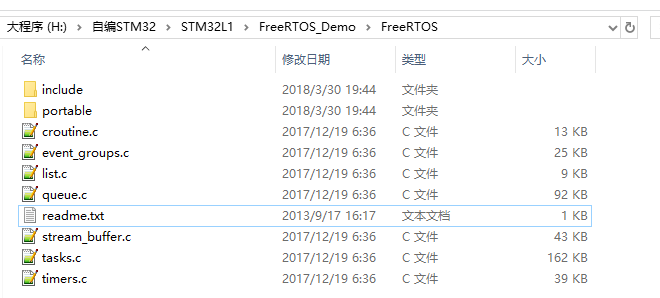
创建FreeRTOS文件夹,并将前期准备的Source文件里的文件复制到该文件夹内。
2.2 Keil工程分组添加FreeRTOS文件
分别添加FreeRTOS和FreeRTOS_PROTABLE。

注:采用heap_x.c是几种不同的内存管理方法,这里选择4。
2.3 添加头文件路径
2.4 添加FreeRTOSConfig.h到文件夹
将官方的FreeRTOSConfig.h(例程中有)添加到任意一个工程文件即可,只要使得Keil工程找得到。这里放到了FreeRTOS->include文件夹中。
2.5 编译发现定义问题
A1586E: Bad operand types (UnDefOT, Constant) for operator (
是因为将5和4U进行了计算,在main.h中加入
//强制把__NVIC_PRIO_BITS定义为4,而不是4U
#if 1
#ifdef __NVIC_PRIO_BITS
#undef __NVIC_PRIO_BITS
#define __NVIC_PRIO_BITS 4
#endif
#endif
2.6 编译发现PendSV_Handler和SVC_Handler重定义
屏蔽掉stm321xx_it.c中的这两个函数。
注:有可能Systick_Handler也会报错,在FreeRTOSConfig.h中没有屏蔽掉

我把它也屏蔽,然后保留it里的systick_handler。
2.7 更改SYSTEM文件
- sys.h文件
#define SYSTEM_SUPPORT_OS 1 //定义系统文件夹是否支持OS
- usart.c文件
1、添加FreeRTOS的h文件
#if SYSTEM_SUPPORT_OS
#include "includes.h" //os 使用
#include "FreeRTOS.h"//FreeRTOS
#endif
2、删掉UCOS的OSIntEnter和OSIntExit
USARTx_IRQHandler中,以下的两段代码删除。
#if SYSTEM_SUPPORT_OS //使用OS
OSIntEnter();
#endif
#if SYSTEM_SUPPORT_OS //使用OS
OSIntExit();
#endif
2.8 更改系统时钟
1、改写SysTick_Handler()
配置FreeRTOS的系统时钟。FreeRTOS的心跳由滴答时钟产生。
stm32l1xx_it.c文件
#ifdef SYSTEM_SUPPORT_OS
#include "FreeRTOS.h"
#include "task.h"
#endif
extern void xPortSysTickHandler(void);
extern BaseType_t xTaskGetSchedulerState( void );
void SysTick_Handler(void)
{
// HAL_IncTick();
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)
{
xPortSysTickHandler();
}
}
2、系统时钟配置
sys.c文件中的SystemClock_Config函数:
/**配置SysTick系统滴答时钟中断时间
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/configTICK_RATE_HZ);
configTICK_RATE_HZ这里原来是数字1000,表示以1000hz的频率中断。configTICK_RATE_HZ在FreeRTOS中也定义为了1000,1ms中断一次。
2.9 例程代码测试
main.c
#include "main.h"
#include "FreeRTOS.h"
#include "task.h"
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
//任务优先级
#define UART_TASK_PRIO 2
//任务堆栈大小
#define UART_STK_SIZE 50
//任务句柄
TaskHandle_t UartTask_Handler;
//任务函数
void uart_task(void *pvParameters);
//任务优先级
#define LED1_TASK_PRIO 3
//任务堆栈大小
#define LED1_STK_SIZE 50
//任务句柄
TaskHandle_t LED1Task_Handler;
//任务函数
void led1_task(void *pvParameters);
//任务优先级
#define FLOAT_TASK_PRIO 4
//任务堆栈大小
#define FLOAT_STK_SIZE 128
//任务句柄
TaskHandle_t FLOATTask_Handler;
//任务函数
void float_task(void *pvParameters);
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建UART任务
xTaskCreate((TaskFunction_t )uart_task,
(const char* )"uart_task",
(uint16_t )UART_STK_SIZE,
(void* )NULL,
(UBaseType_t )UART_TASK_PRIO,
(TaskHandle_t* )&UartTask_Handler);
//创建LED1任务
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
//浮点测试任务
xTaskCreate((TaskFunction_t )float_task,
(const char* )"float_task",
(uint16_t )FLOAT_STK_SIZE,
(void* )NULL,
(UBaseType_t )FLOAT_TASK_PRIO,
(TaskHandle_t* )&FLOATTask_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//UART任务函数
void uart_task(void *pvParameters)
{
while(1)
{
printf("\r\n300ms\r\n");
vTaskDelay(300);
}
}
//LED1任务函数
void led1_task(void *pvParameters)
{
while(1)
{
BSP_LED_On(LED2);
vTaskDelay(200);
BSP_LED_Off(LED2);;
vTaskDelay(800);
}
}
//浮点测试任务
void float_task(void *pvParameters)
{
static float float_num=0.00;
while(1)
{
float_num+=0.01f;
printf("\r\nfloat_num的值为: %.4f\r\n",float_num);
vTaskDelay(2000);
}
}
int main(void)
{
HAL_Init();
/* Configure the system clock to 32 MHz */
SystemClock_Config();
TIM2_Init(9,2096);
HAL_TIM_Base_Start_IT(&htim2);
/* Add your application code here
*/
uart_init(9600); //初始化USART
BSP_LED_Init(LED2);//PA5
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
3、查看是否支持FPU
前提:芯片自带FPU,浮点计算单元,比如STM32F4。而STM32L1系列没有。
float_num+=0.01f;
以上代码出断点,再进行硬件仿真。查看响应的asm代码。如果发现使用了s0等浮点寄存器,或者VLDR、VADD等浮点指令。说明FreeRTOS支持FPU。
结论:FreeRTOS支持FPU。而STM32L1没有FPU单元,故采用CPU计算浮点。
欢迎关注我的微信公众号
互联网矿工
