AUTOSAR框架的CAN通信配置说明,涉及CAN Driver、CAN IF、PDUR、BSW任务、RTE任务等模块的信息流和模块介绍
1.AUTOSAR的CAN通信介绍
CAN通信相关配置资源 提取码: 5r2i
AUTOSAR的通信是其最复杂的部分之一,其中CAN在汽车上有大量的应用,故对CAN通信进行介绍、配置和实验。
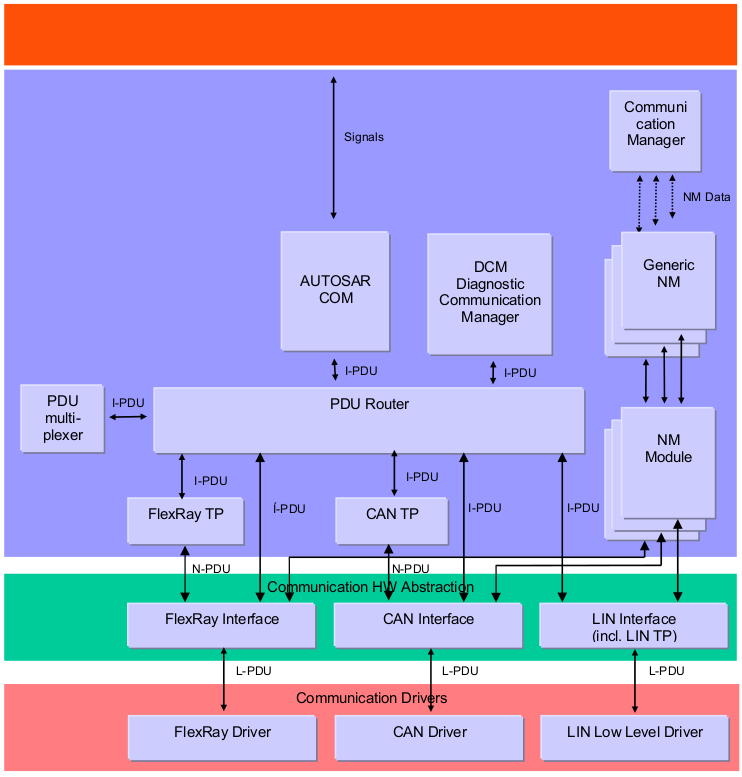
下图是AUTOSAR的通信框图。整个图贯穿了基础软件层(Basic SoftWare layer, BSW)的MCAL、硬件抽象层和系统服务层。
-
MCAL
最底层(红色)是MCAL,具体而言是不同通信协议的驱动,比如FlexRay Driver、CAN Driver、LIN Low Level Driver等。对于CAN Driver而言,数据接收中断服务函数在此处定义,最终也通过此处驱动实现数据的发送。
-
硬件抽象层
再上一层(绿色)是硬件抽象层,具体而言是不同通信协议的接口,比如FlexRay Interface、CAN Interface、LIN Interface等。MCAL层和硬件抽象层之间的PDU称为L-PDU,其(以CAN为例)全称为CAN(Data Link Layer) Service Data Unit,包括CAN数据帧ID、DLC(数据长度)、数据(L-SDU)。
-
通信服务器层
再上一层(蓝色)是通信服务器层,此处包含了诸多服务模块,比如CAN TP、PDURouter、COM、NM等。
-
数据形式
硬件抽象层和通信服务层的TP(Transport Protocal)间数据形式称为N-PDU,(以CAN为例)全称Network Protocal Data Unit of the CAN Transport Layer,包括唯一ID、数据长度、数据,可以处理多帧CAN数据。另外,还有一个J1939TP(此处未画出),可能对于汽车电子行业来说也非常重要。
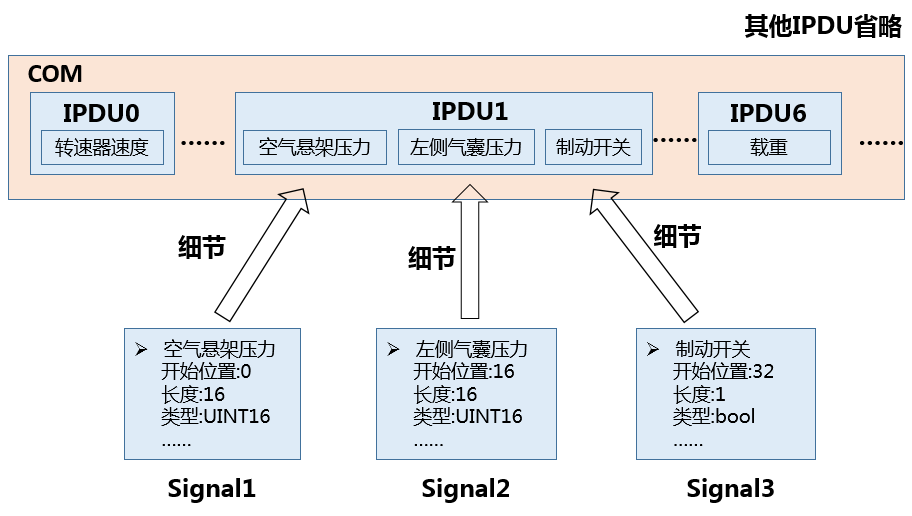
硬件抽象层和除了TP外的通信服务之间的数据形式称为I-PDU,全称Interaction Layer Protocal Data Unit。一个I-PDU中可以包含多个信号Signal,比如一个CAN数据帧长度为8个字节,第
[0:15]位是空气悬架压力信号,第[16:31]位是左侧气囊压力信号,第[32]位是制动开关信号,具体见下图。需要说明的是,自此以后,上层已经无法知道底层的通信协议。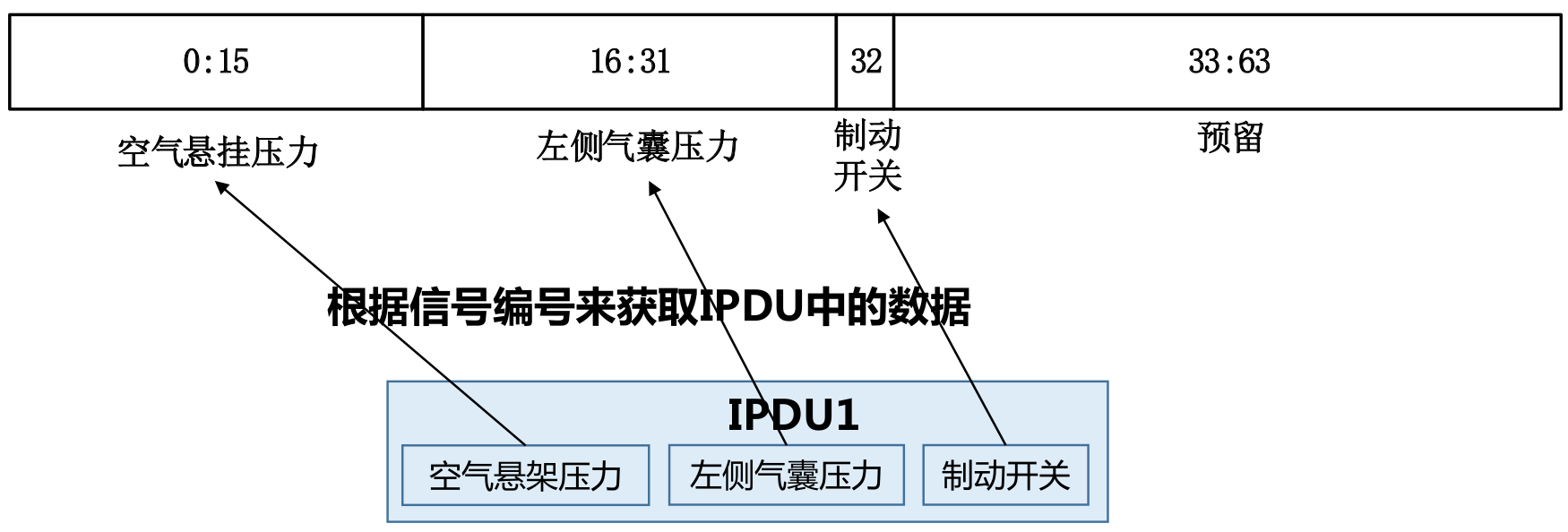
-
模块
PDUR(PDU Router)主要用于分发数据,比如可以决定CANIF(CAN Interface)模块传上来数据下一步传到某个模块(具体配置和解释见下面章节)。
COM模块主要进行数据的缓存、管理(比如某一个Signal在一个IPDU中的定位),面下可以接收和发送数据,面上可以给SWC提供信号获取接口(具体配置和解释见下面章节)。
CANSM全称CAN State Manager,主要用于管理CAN通信的不同网络(总线)。我的理解是,对于不同总线上的CAN控制器,可以分配到不同的CAN网络,进而进行管理。
NM全称Network Manager,主要用于管理不同的通信协议,比如CAN、LIN、FlexRay等。
-
2.简单系统——CAN控制PWM
我们以一个CAN控制PWM的系统(CanCtrlPwm子工程)为例来解释CAN通信和上层应用如何合作运行,如下图所示。
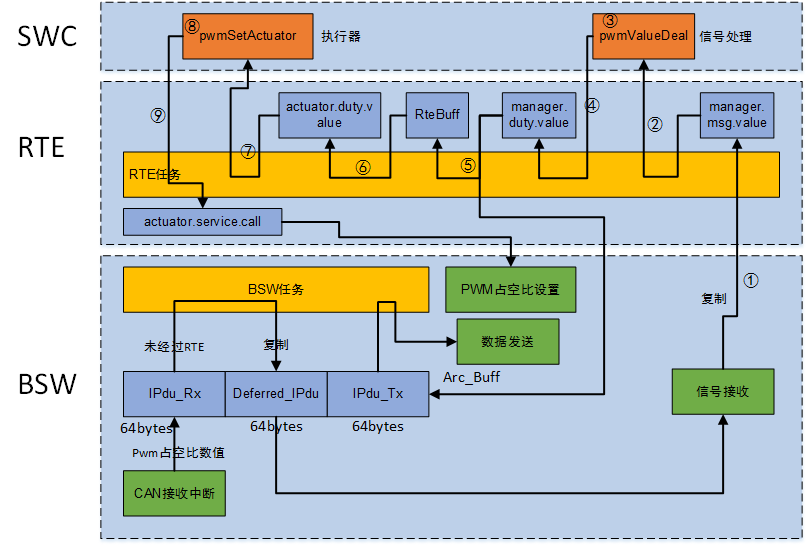
- CAN Controller挂在CAN 总线上,如果有PWM设置数据发送到总线,ECU就会进入CAN接收中断;
- 接受中断经过
CAN Driver -> CANIF -> PDUR -> COM这个流程后,穿过BSW层,将数据存放到COM模块的缓存,即图中的IPdu_Rx(图中配置了64字节长度,其实对于单个CAN数据帧而言,图中三个缓存区都只需要8字节即可); - BSW任务会周期性将
IPdu_Rx的数据拷贝到Deferred_IPdu中; - 上层SWC应用pwmValueDeal可以通过RTE将
Deferred_IPdu中的PWM设置数据拷贝到和pwmValueDeal绑定的结构体成员变量manager.msg.value中,对应图中的第① 步; - 上层SWC应用pwmValueDeal再通过RTE读取
manager.msg.value中的PWM设置数据,进行处理后,进而存放到manager.duty.value,对应图中的第② ③ ④ 步; - 为了让执行器pwmSetActuator能够拿到处理后的数据
manager.duty.value,上层SWC应用pwmValueDeal再通过RTE将manager.duty.value存放到RteBuff中,对应图中的第⑤步,不同SWC间的通信都通过Buff来实现;另外,pwmValueDeal还将manager.duty.value存放到CAN的发送缓存区IPdu_Tx,BSW任务会将其发送出去,对应图中的第⑤步; - 上层SWC应用pwmSetActuator可以通过RTE从RteBuff中读取pwmValueDeal存放的数据,进而存放到和pwmSetActuator自身绑定的结构体成员变量
actuator.duty.value中,对应第⑥ 步; - 上层SWC应用pwmSetActuator可以通过RTE从
actuator.duty.value中读取PWM设置数据,并通过回调函数来设置PWM占空比(回调函数的形式在AUTOSAR中成为CS模式,即客户端服务器模式,前面获取数据的过程成为RS模式,即接收者发送者模式),对应第⑦ ⑧ ⑨步。
说明1:目前SWC都放在RTE任务中周期性运行,BSW任务也作为一个任务周期性运行。后期考虑将SWC分任务运行。
说明2:这个简单的系统只使用了1路CAN,而且IPDU和信号也非常简单。下一章节设计的multican则包含了多个CAN、多个IPDU、IPDU可能还包含了多个信号Signal。
说明3:目前设计的CAN通信信息流都是CAN Driver -> CANIF -> PDUR -> COM(接收)、COM -> PDUR -> CANIF -> CAN Driver(发送)的流程。
3.CAN通信信息流
上一章节说明了一个简单的系统是如何工作的,但是CAN数据具体如何在BSW中流通未进行详细说明。这一部分对于整个代码来说也是较大的一块工作量。在修改代码(master主分支,multican分支)的过程中,和CAN通信相关的修改内容均进行了备注,并且带有标签[MULTICAN],可以使用VSCode全局搜索查看。需要说明的是本部分对multican子工程进行配置说明,而不是简单系统CanCtrlPwm。下面就进行CAN通信信息流的详细说明。
3.1 CAN控制器配置和信号定义
-
CAN控制器配置
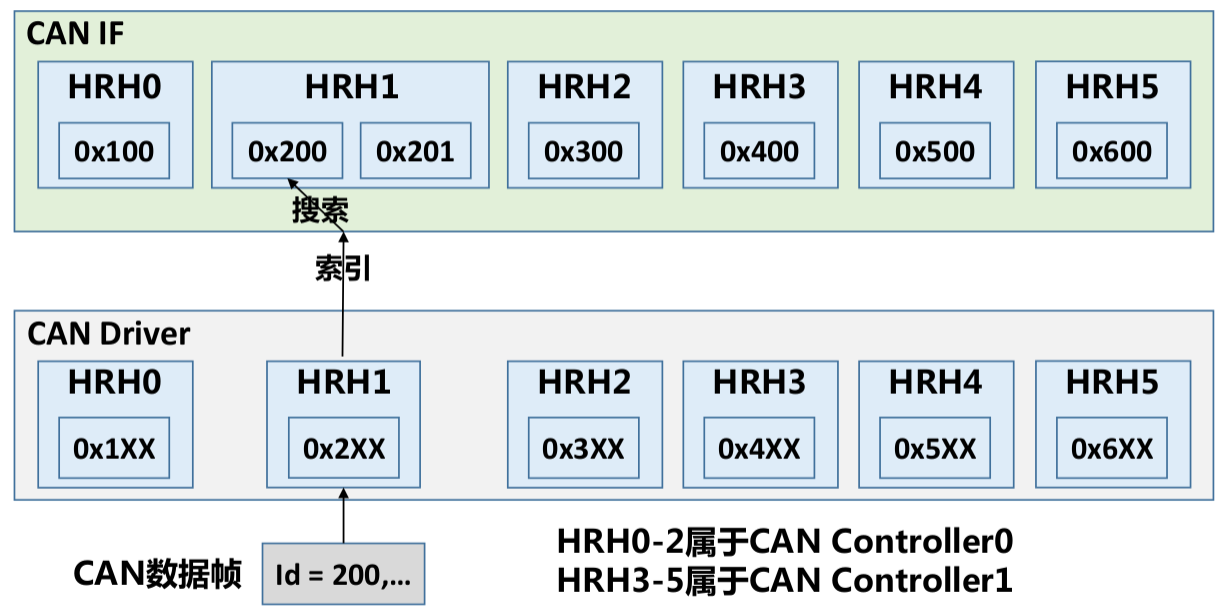
目前共配置2个CAN控制器(英飞凌芯片共 3个CAN控制器),每个CAN控制器包含3个HRH(接收的Handler)和3个HTH(发送的Handler),对应配置了不同的ID类型(标准帧或者拓展帧)、ID掩码(进而HRH可以对应接受某一些数据帧)等。具体配置信息如下所示,共12个HOH(6个HRH和6个HTH),其中HRH0配置为可以接收ID为
0x1XX(XX表示掩码设置为0,不关心)的CAN数据帧,HRH1接受ID为0x2XX的CAN数据帧,HRH2接受ID为0x3XX的CAN数据帧,HRH3接受ID为0x4XX的CAN数据帧,HRH4接受ID为0x5XX的CAN数据帧,HRH5接受ID为0x6XX的CAN数据帧(掩码在下图中未体现)。该配置文件通过EB软件生成。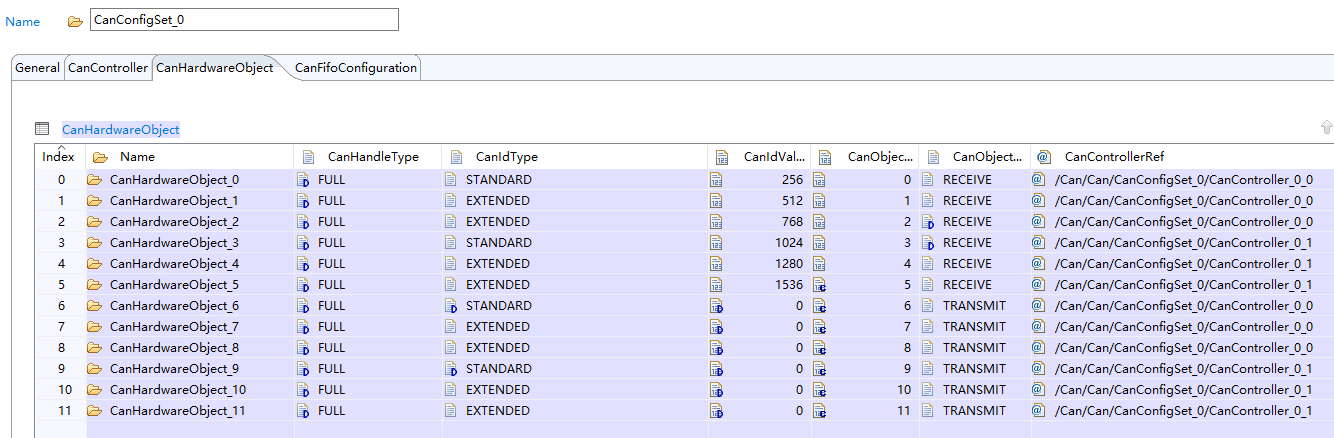
-
信号定义
CAN数据分为接收和发送两部分。
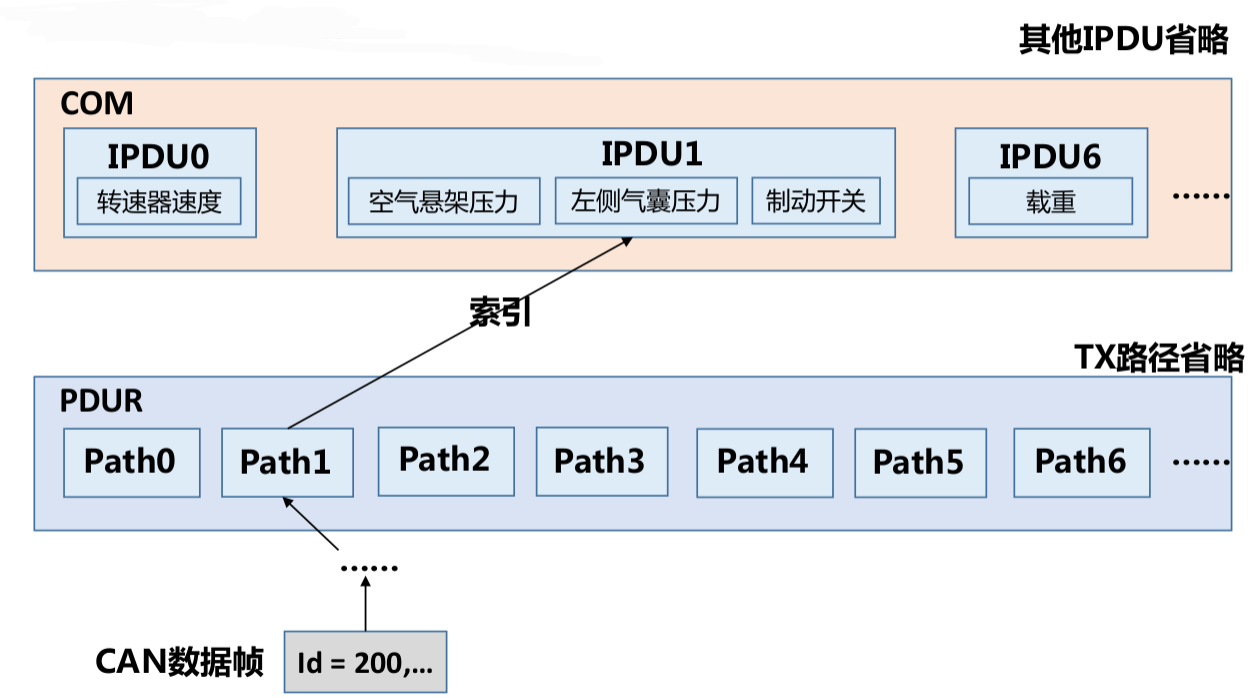
接收过程中,在CAN IF模块过滤时,共设置7个接收的PDU ID规则(ID分别是
0x100、0x200、0x201、0x300、0x400、0x500、0x600),除了HRH1对应2个之外,其他HRH都只接收一个PDU。CAN IF过滤后,体现在通信服务层中的PDUR和COM模块的IPDU,也是共7个。为了体现出信号的概念,在IPDU1中定义了3个信号,也就是说这一CAN数据帧中包含了3个信号——空气悬挂压力、左侧气囊压力、制动开关。具体见下图。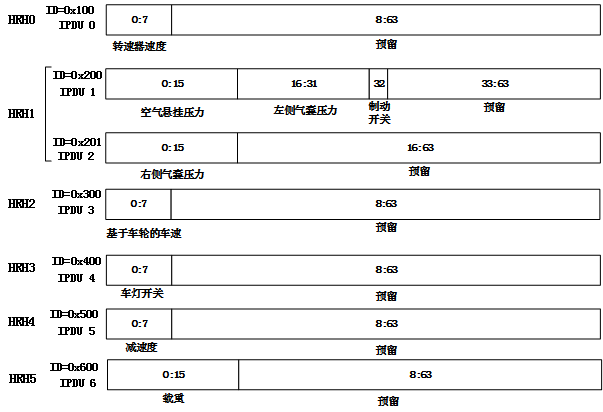
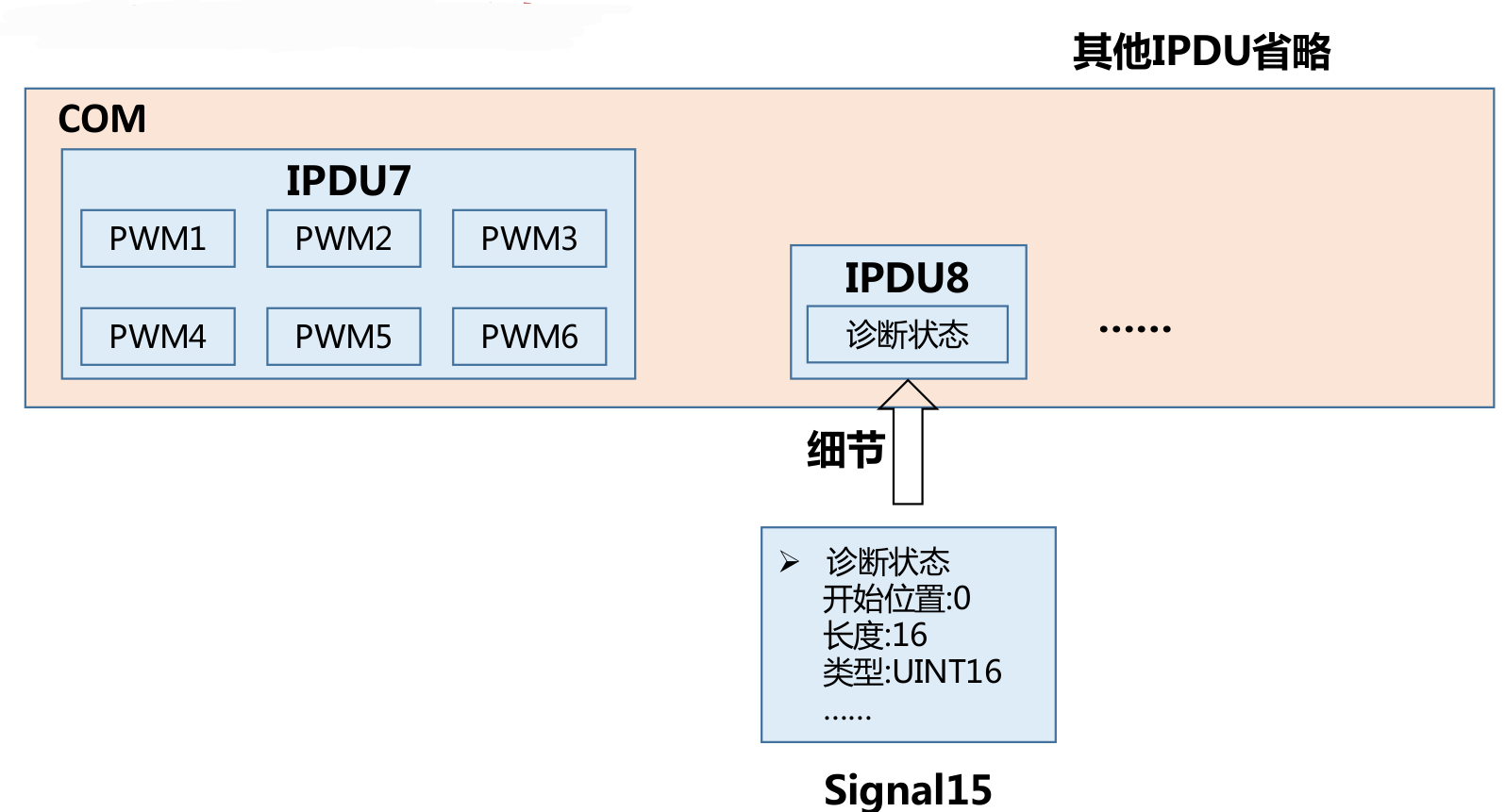
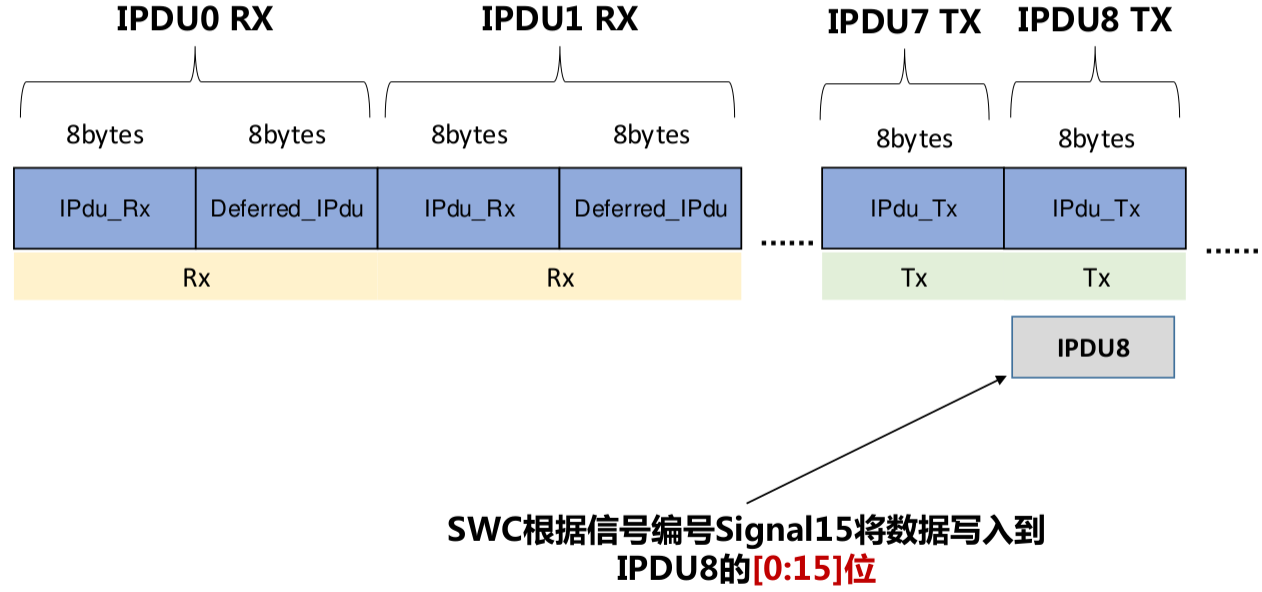
发送过程中,在COM模块中共设置了6个IPDU,和HTH一一对应,ID分别为
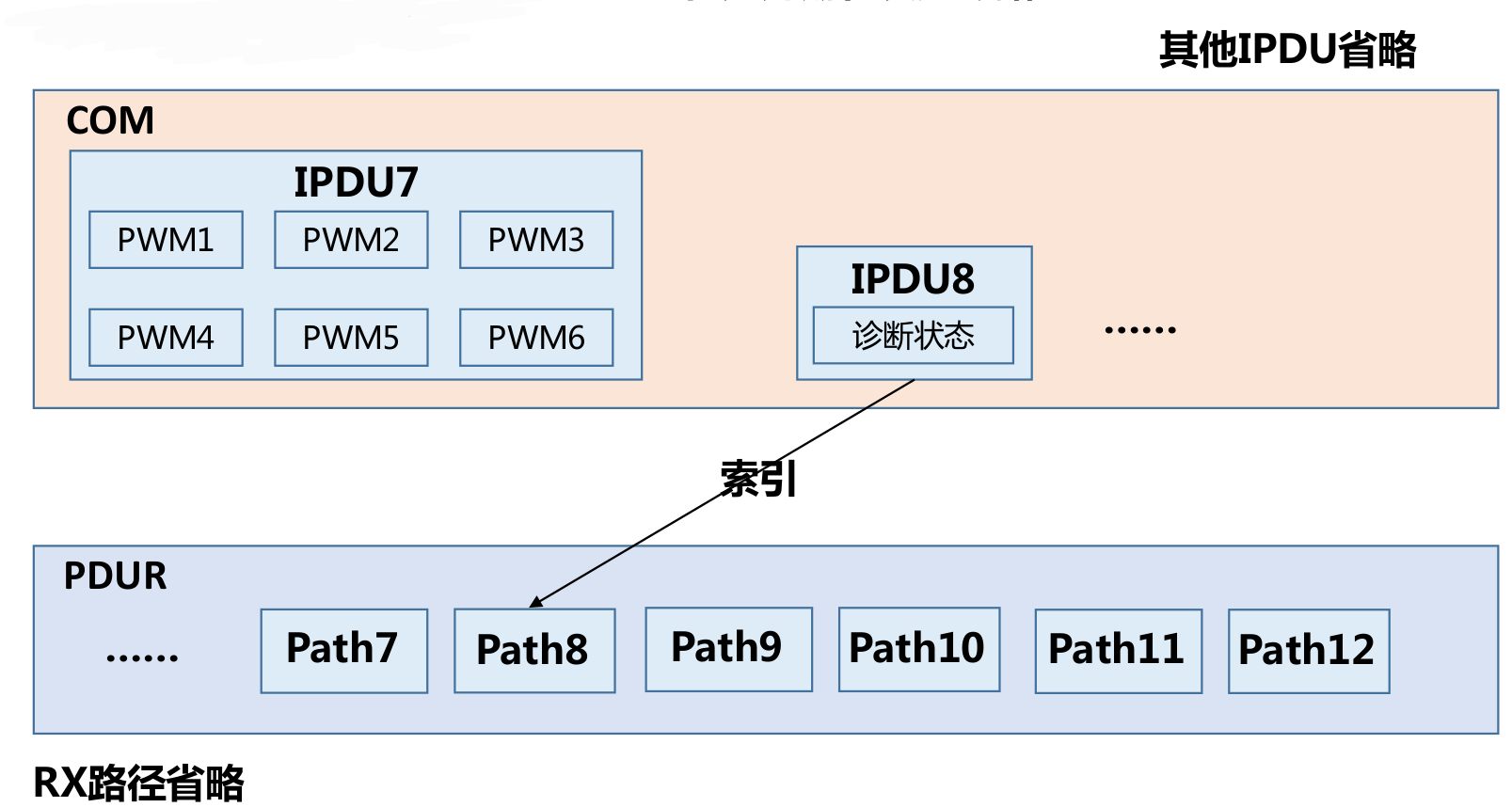
0x10、0x11、0x12、0x13、0x14、0x15。为了体现出信号的概念,在IPDU7中定义了3个阀的6个PWM信号(每个阀有2个PWM控制),其余的IPDU都只包含1个信号。具体见下图。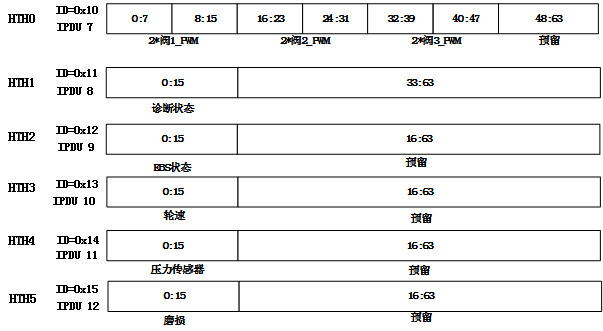
3.2 CAN数据接收
3.2.1 CAN Driver到CAN IF
我们以IPDU1为例,也就是ID为0x200的CAN数据帧。IPDU1对应的HRH1有2个过滤规则,除了IPDU1的0x200,还有IPDU2的0x201。
CAN控制器接收到CAN数据后,会进入中断,对于并根据硬件滤波器设置的数值可以对应到HRH1,也就是0x2XX。CAN中断会调用CAN IF模块接口CanIf_RxIndication( Can_HwHandleType Hrh, Can_IdType CanId, uint8 CanDlc, const uint8 *CanSduPtr ) @ CanIf.c。Hrh参数可以索引到CAN IF模块中对应的HRH过滤规则集合(在本例程中为结构题CanIf_RxPduConfigType HrhRxPdu_CanIfHrhCfg1 @ CanIf_PBCfg.c,HRH1共有2个过滤规则)。
CanIf_RxIndication函数内首先进行CAN IF模块设置的过滤规则搜索。过滤规则分为两种方式——binarySearch(二分查找)、linearSearch(线性查找)。从字面上就可以理解为,binarySearch使用二分查找的方法找到过滤规则集合中的某一个规则,而linearSearch使用线性查找的方法找到过滤规则集合中的某一个规则。需要注意的是,使用binarySearch时,HRH过滤规则集合中的过滤规则必须是从小到大排列。由于单个HRH的过滤规则很少,我们本次使用线性查找方法。
CAN数据帧的ID是0x200,linearSearch可以搜索到对应的0x200过滤规则。
3.2.2 CAN IF到PDUR
上一步找到了CAN数据帧对应的过滤规则,在过滤过则中,还会定义下一个模块是什么(通过定义回调函数编号实现)、对应下一个模块中的PDU编号是什么、CAN数据帧长度、标准帧还是拓展帧等。
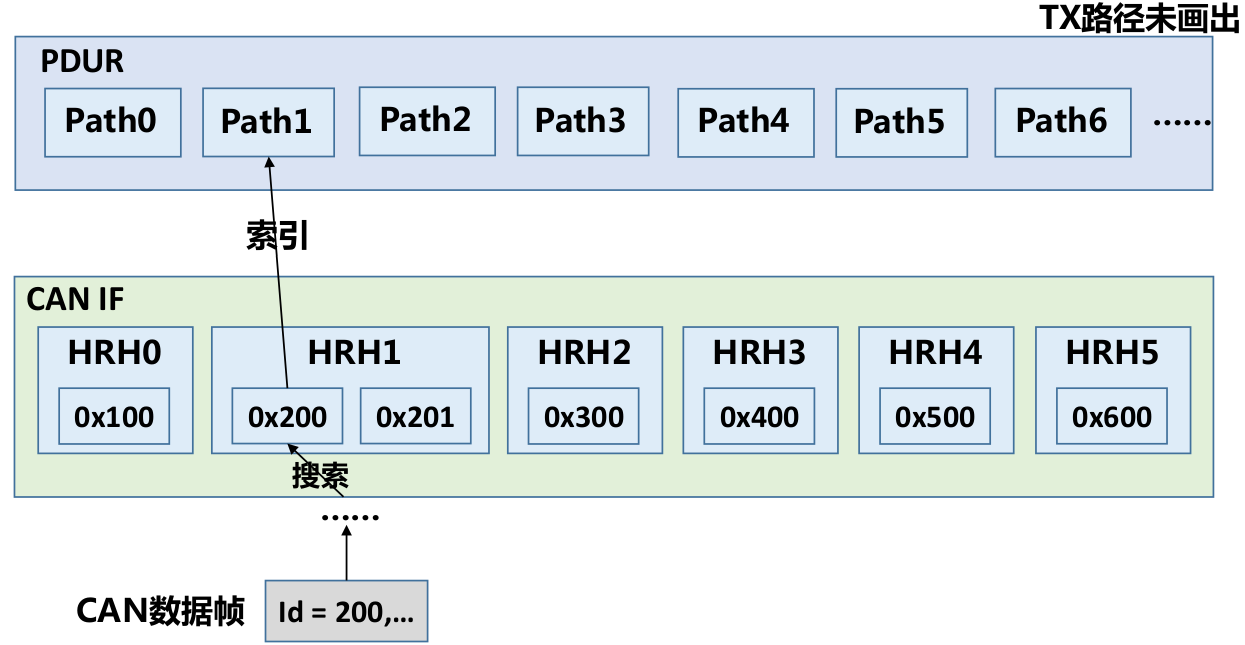
根据上述定义的回调函数编号PDUR_CALLOUT(=3),搜索到CAN IF模块的CanIfUserRxIndications @ CanIf_Cfg.c第3个接口,也就是PDUR模块的面向CAN IF模块的接口PduR_CanIfRxIndication(PduIdType pduId, PduInfoType* pduInfoPtr) @ PduR_CanIf.c。pduId可以搜索到PDUR模块中的某一条路径。对于ID为0x200的CAN数据帧来说,对应了PDUR模块的Path1。
3.2.3 PDUR到COM
上一步找到了CAN数据帧对应的PDUR模块中的Path1,其中定义了源模块(此处是CANIF)、源PDU ID(此处是CAN IF模块中规则的编号)、PDUR的目的PDU定义(包括目的模块、目的PDU ID等)。
上一小节提到的PduR_CanIfRxIndication函数最终会调用PDUR模块的PduR_ARC_RxIndication(PduIdType PduId, const PduInfoType* PduInfo, uint8 serviceId) @ PduR_Logic.c。该函数根据Path1定义的目的模块(本例程是COM模块)找到了下一个模块COM的接口Com_RxIndication(PduIdType RxPduId, PduInfoType* PduInfoPtr) @ Com_Com.c。Com_RxIndication会将CAN数据帧拷贝到缓存区中,也就是简单系统——CAN控制PWM的IPdu_Rx缓存区。
COM模块会对IPDU进行管理。比如对于IPDU1,有3个信号空气悬挂压力、左侧气囊压力和制动开关。那么在COM中,对应该IPDU会设置3个信号配置信息,如下图所示。
具体而言,每个信号定义了信号ID、所在IPDU的ID、初始化数值、在IPDU中的起始位置、信号长度、数据类型等。上层的SWC可以直接通过信号ID来索引拿到对应的信号数据。
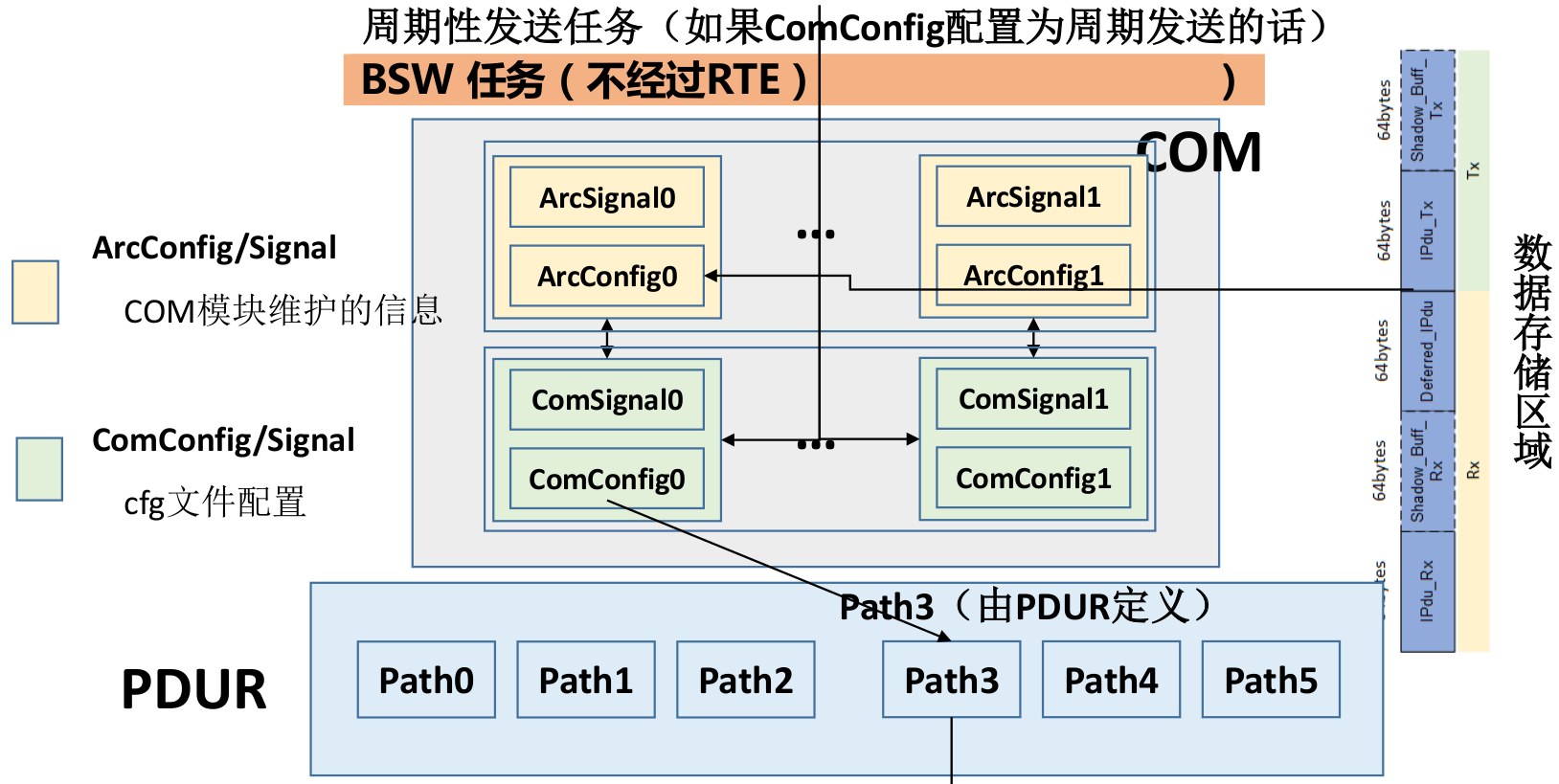
COM的IPDU配置和信号配置
COM的配置文件中配置了ComIPdu(IPDU的配置信息)和ComSignal(信号的配置信息),一个IPDU可以包含1个或者多个信号。而COM还会维护一个Com_Arc_Config,为每个IPDU和Signal维护Arc_IPdu和Arc_Signal,Arc_IPdu中存放了IPDU缓存区、Deferred缓存区、发送IPDU定时器等信息。COM工作的时候,会以Arc_IPdu来管理对应的IPDU。
3.2.4 BSW任务和COM
CAN中断将数据放到COM的缓存区IPdu_Rx后,可以再设置一个对应的缓存区,专门用于存放IPdu_Rx中的数据,我们命名其为Deferred_IPdu。设置Deferred_IPdu的原因:由于中断到来的时间不确定,所以上层从IPDU缓存区IPdu_Rx获取数据的时候,必须将中断关闭(进入临界区)。如果上层太多次直接从IPdu_Rx获取数据,就会造成对中断极大的影响,所以需要一个任务统一将IPdu_Rx数据先拷贝到Deferred_IPdu(此时需要进入临界区),供大家一块使用。
上述统一将IPdu_Rx数据先拷贝到Deferred_IPdu的任务是OsBswTask @ BSWMainFunctionTask.c,如下图所示。
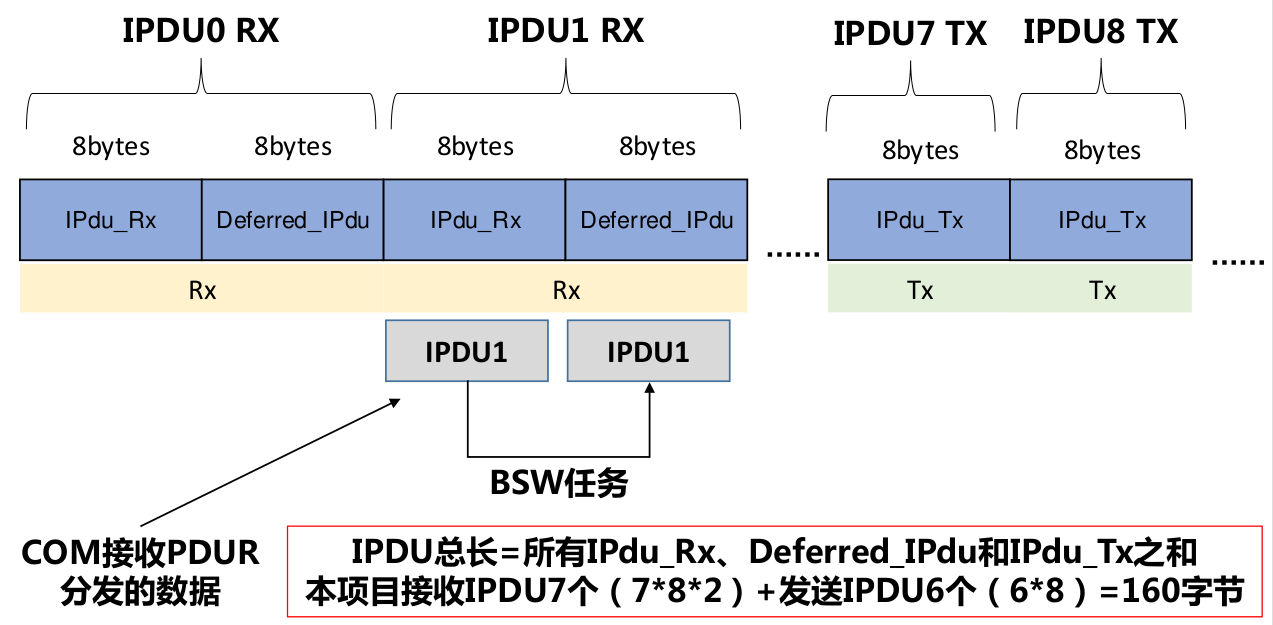
本项目将IPDU的单个缓存区都设置成了8个字节,那么对于接收而言,共7个IPDU,所以共7 * 8 * 2 = 112个字节。公式中的2表示一个 IPDU包括IPdu_Rx和Deferred_IPdu一对;对于发送而言,共6个IPDU,所以共6 * 8 = 48个字节,总发送和接收共160个字节。
具体过程是,COM接收到PDUR分发的数据存放在IPdu_Rx缓存区中,然后BSW任务将IPdu_Rx缓存区中的数据拷贝到Deferred_IPdu缓存区(此时需要进入临界区,不能被CAN中断打断,否则读取数据可能不对),而SWC取Deferred_IPdu缓存区中的数据不需要进入临界区。
3.2.5 SWC任务和COM
SWC应用目前都放在RTE任务里,周期性执行。某一些SWC需要获取CAN数据,具体是通过函数Com_ReceiveSignal(Com_SignalIdType SignalId, void* SignalDataPtr) @ Com_Com.c实现的。第一个参数SignalId是信号编号,即在CAN控制器配置和信号定义已经定义,第二个参数SignalDataPtr是数据读出来后存放的位置。比如需要获取制动开关信号,则调用函数Com_ReceiveSignal(ComConf_ComSignal_BrakeStatus_RX, &brakestatus)。
3.3 CAN数据发送
CAN数据发送的配置和接收类似,下面进行简略说明。
3.3.1 SWC任务和COM
SWC任务会将数据写入到对应IPDU的信号区域。以HTH1的诊断状态为例。具体通过函数Com_SendSignal(Com_SignalIdType SignalId, const void *SignalDataPtr) @ Com_Com.c实现的。第一个参数SignalId是信号编号,即在CAN控制器配置和信号定义已经定义,SignalDataPtr是数据源。
调用该函数后,会将数据拷贝到对应的IPDU缓存区。
3.3.2 BSW任务和COM
BSW任务周期性调用Com_MainFunctionTx @ Com_Sched.c。BSW周期发送数据的流程:Com_MainFunctionTx函数一次就会将每个发送IPDU计数器减小1,在COM模块中配置了不同发送IPDU的发送周期ComTxModeTimePeriodFactor(计数器初始值),如果计数器等于0则发送数据。需要注意的是,还可以设置最小的发送延时ComTxIPduMinimumDelayFactor。下图仅作为示意图,和multican工程无直接关系。
3.3.3 COM到PDUR
COM的配置信息中配置了发送IPDU的管理信息,比如IPDU发送周期(该周期是调用Com_MainFunctionTx函数的次数,如配置为10,则调用函数10次后发送数据)、IPDU数据长度、接收或者发送等,具体见代码。
3.3.4 PDUR到CAN IF
PDUR模块在发送的时候也作为一个分发的角色,每个IPDU都有对应的Path,进而索引到对应CAN IF模块中配置的HTH和对应CAN数据帧ID等信息。
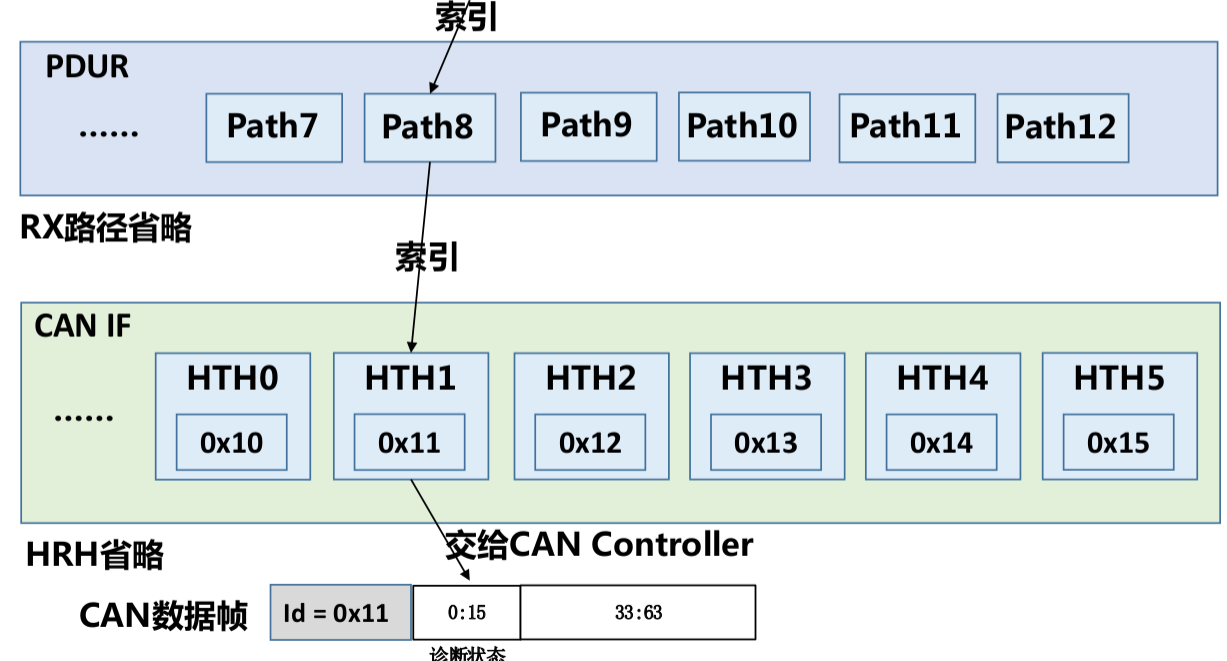
3.3.5 CAN IF到CAN Driver
CAN IF模块中包含每个发送IPDU的配置信息,比如CAN数据帧ID、标准帧或者拓展帧等。CAN IF模块会调用Can_Write来将数据发送出去。
欢迎关注我的微信公众号
互联网矿工
