AUTOSAR框架的通信部分联系了底层硬件和运行时环境RTE
1.前言
1.1 CANTP(ISO 15765)介绍
ISO 15765标准由一般信息、网络层信息、统一诊断服务(UDS)、相关排放系统要求等组成。ISO 15765适用于ISO 11898制定的同一个车辆诊断控制区域网络内(CAN),多用于诊断系统。AUTOSAR框架的CANTP模块是ISO 15765的实现,具备多帧传输的功能。
具体而言,ISO 15765将数据帧(包括ID等)分为了三个域——地址信息N_AI、协议控制信息N_PCI、数据域N_Data。其中,N_CPI起到了主要的通信控制作用。

1.2 J1939TP(SAE J1939)介绍
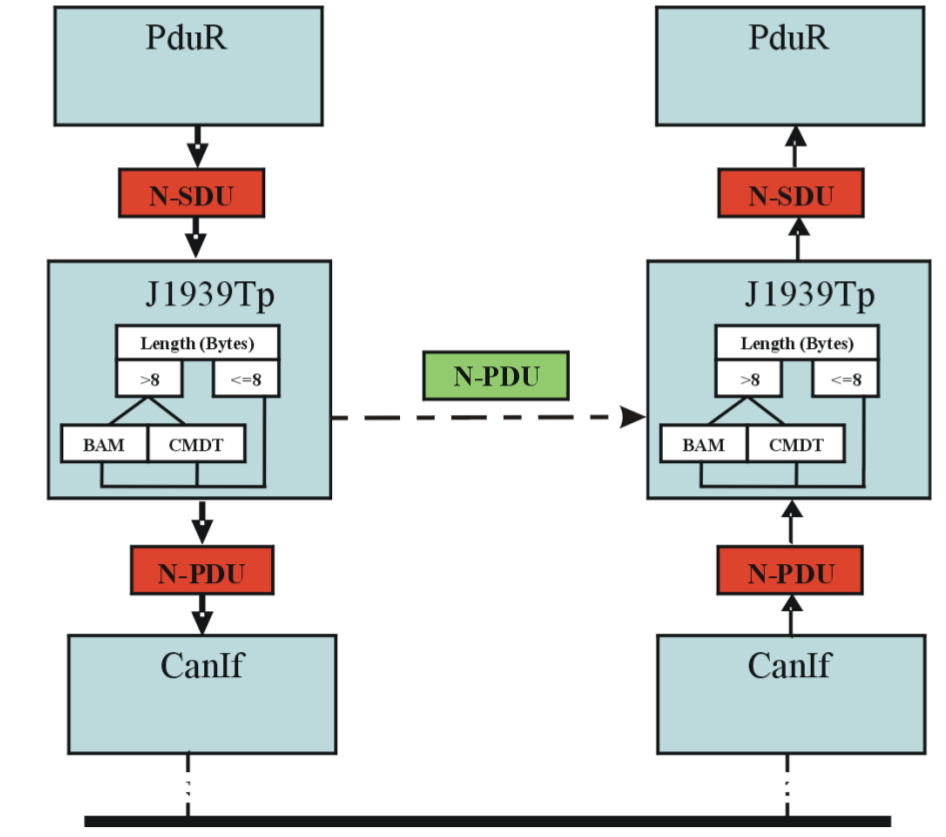
SAE J1939标准相比于ISO15765更加复杂,具备设备间的连接管理、多帧传输等功能,还将CAN数据帧的ID(标准、拓展帧均可)进行了进一步的定义。所谓的“定义”指的是将CAN数据帧ID的11位(标准帧)或者29位(拓展帧)重新定义为优先级(P)、保留位(R)、数据页(DP)、PDU格式(PF)、特定PDU(PS)、源地址(SA)。如下图所示,

需要说明的是,
- 数据页位选择参数群(PG, Parameter Group)描述的辅助页,在分配页1的参数群编号(PGN, Parameter Group Number)之前,先分配页0的可用PGN。
PG参数群概念:PG是可以放在一起发送的一些数据,这些数据可以是在一帧数据中传完,也可以通过J1939的多帧传输协议来通过多次传输实现,取决于数据的长度。比如参数群中共有2个信号——车胎压力(8字节)、轮速(16字节),总共3字节数据,而J1939协议对于小于等于8字节的数据可以直接传输(DIRECT传输方式,具体见下方)。比如参数群中共有6个信号——PWM占空比1(16字节)、PWM占空比2(16字节)、PWM占空比3(16字节)、PWM占空比4(16字节)、PWM占空比5(16字节)、PWM占空比6(16字节),总共12字节数据,此时J1939协议可以通过2个数据帧来发送数据(CMDT传输方式,具体见下方),也可以通过广播(BAM传输方式,具体见下方)的形式发送。另外要说明的是,1个PG对应1个PGN。
-
J1939数据帧ID定义中的特定PDU(PS)的意义是由PDU格式(PF)决定的
如果PF
>=240,则PS是群拓展GE(Group Extension, 也就是说PGN可以更多),如果PF<240,则PS是目标地址(Destination Addr),GE等于0。也就是说,对于PF<240的情况,指定了目标地址,但是可以传输的PG(也可以说是PGN)变少了。 -
PGN组成和个数
PGN由保留位(R)、数据页(DP)、PDU格式(PF)和群拓展(GE)组成。如果PF
>=240,则PS是群拓展GE(Group Extension, 也就是说PGN可以更多),如果PF<240,则PS是目标地址(Destination Addr),GE等于0。PGN个数计算:
(240 + (16 * 256) * 2) = 8672。其中,240是每个数据页(DP, Data Page)中的PF<240时,GE恒等于0,所以数目是240。16是每个数据页(DP, Data Page)中的PF>240时,数值从240到255之间,共16个数。256是指GE(等于PS)的取值个数,具体是从0到255之间。2表示数据页,分为页0和页1。
1.3 TP在AUTOSAR框架中的角色
AUTOSAR的传输协议(TP, Transport Protocal)模块是对某个传输协议国际标准的实现,如上述的ISO15765(对应CANTP模块)和SAE J1939(对应J1939TP模块)。我们都知道CAN2.0的一个CAN数据帧最多传输8字节数据,而在汽车电子领域有数据(或者参数群,也就是一组数据)可能需要超过8字节来传输。而TP模块正是可以实现多个CAN数据帧的组包,形成超过8字节的参数群。发送的时候,也会将超过8字节数据拆包发送。下面是CAN TP模块在AUTOSAR框架中的位置。
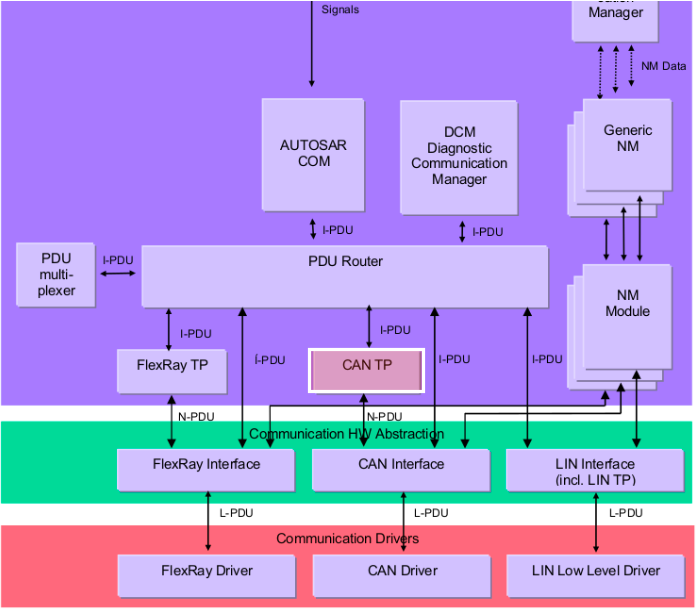
CANTP模块联通PDUR和CANIF模块,实现PDUR到CANIF时的拆包和CANIF到PDUR时的组包功能。最终,CANTP会将数据经过PDUR后依次存放到COM的Buffer中。
2.CAN TP(ISO 15765)的通信过程
2.1 ISO 15765的通信过程
ISO 15765对数据帧进行了划分,其中协议控制信息N_PCI有着通信控制的作用。以下是N_PCI的具体定义,

ISO 15765不像J1939,没有“连接管理”的概念(J1939的连接管理见下方)。其通过重定义CAN数据帧的数据域来实现多帧传输。
单帧(SF),第0个字节被用于控制([7:4] N_PCItype = 0,[3:0] 数据长度SF_DL),数据只需要1帧来传输
首帧(FF),第0和1个字节被用于控制(Byte0的[7:4] N_PCItype = 1,其余12位用于数据长度FF_DL),数据需要多个帧来传输,FF是多个帧的第1帧
连续帧(CF),第0字节被用于控制([7:4] N_PCItype = 2,[3:0] SN连续帧编号,0到15,如果到达15,下一个重置为0),首帧FF后面的帧是连续帧
流控(FC),第0字节到2字节被用于控制(具体见标准),目的是调整CF N_PDUs发送的速率。
2.2 CAN TP模块的通信实现
1. 单帧
下图是一个CAN IF模块将数据发送到CAN TP模块,CAN TP模块组织管理CAN数据帧(单帧SF)的过程。
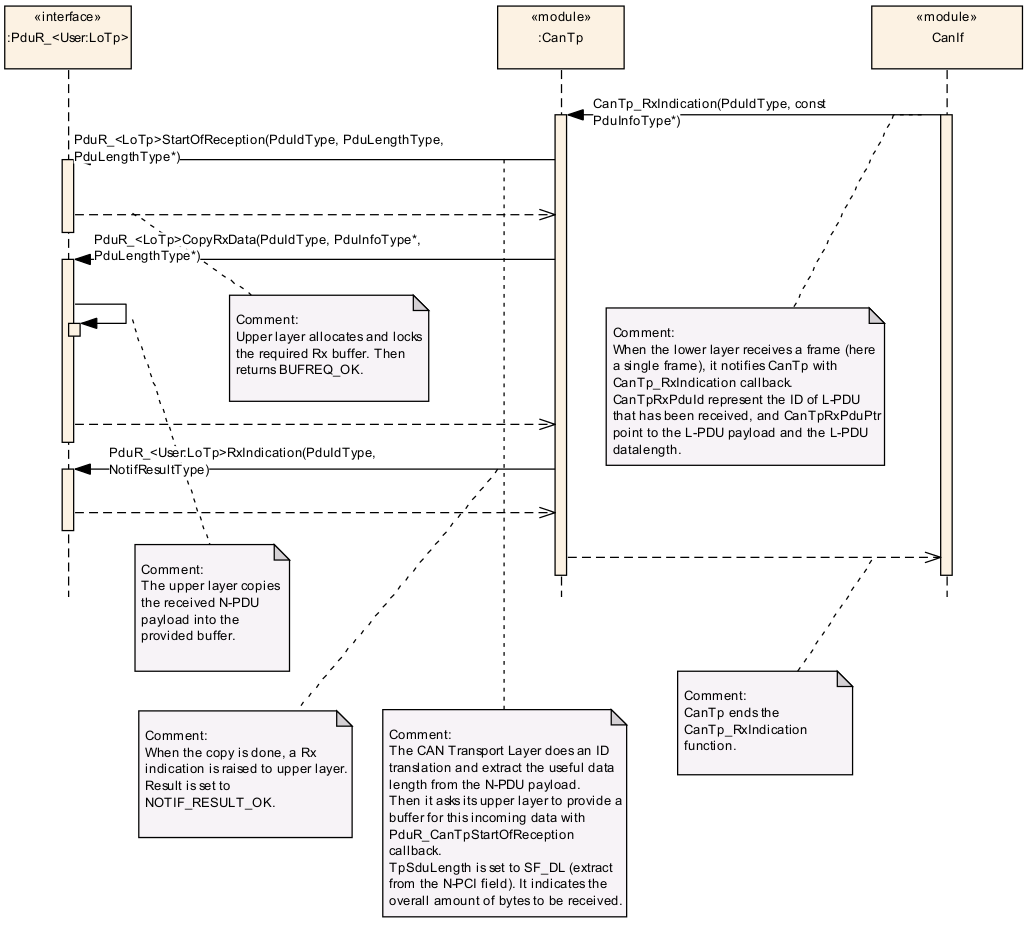
PduR_<LoTp>StartOfReception @ PduR_CanTp.c用于向上层COM模块请求Buffer。
PduR_<LoTp>CopyRxData @ PduR_Logic.c用于拷贝数据到COM模块的Buffer,并将剩余可用Buffer空间写入到参数(调用者提供)。
2. 多帧
下图是一个CAN IF模块将数据发送到CAN TP模块,CAN TP模块组织管理CAN数据帧(多帧,包括首帧FF和连续帧CF)的过程。
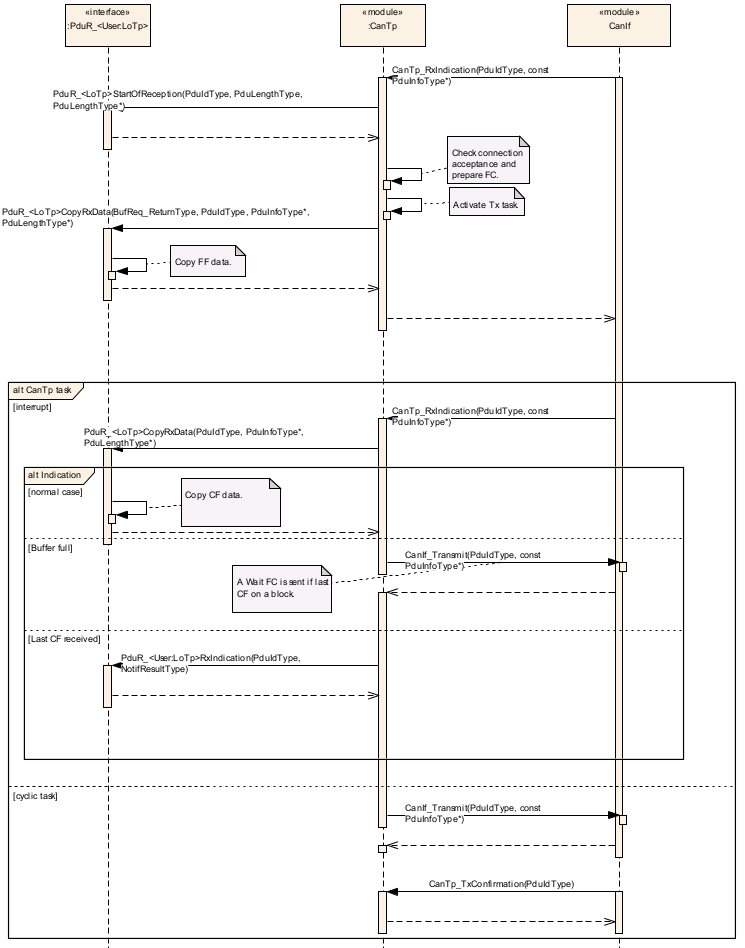
拷贝过程类似单帧,区别是多帧管理的时候,会有currentPosition来指明目前Buffer已经用掉了多少,下次连续帧过来时,拷贝到可利用的Buffer空间(从currentPosition开始)。
3.J1939TP(J1939)的通信过程
3.1 J1939协议的通信方式
J1939协议定义了三种通信方式——广播(BAM, Broadcast Announce Message)、基于连接的数据传输(Connection Mode Data Transfer)、直接数据传输(DIRECT)。如果数据多余8字节,则会通过BAM或者CMDT来发送,而小于等于8字节时,直接发送。
-
DIRECT
在AUTOSAR的J1939TP模块中,会判断需要发送的数据的长度,如果小于等于8字节,则会通过函数
J1939Tp_Internal_DirectTransmit @ J1939Tp.c直接发送。两台设备间没有交互的过程,如下图所示,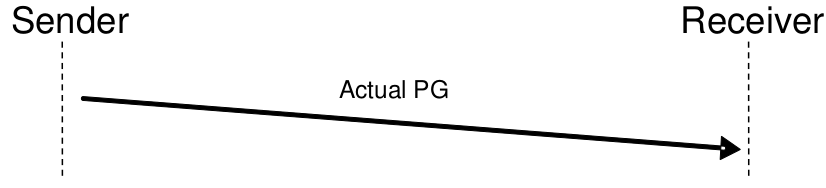
-
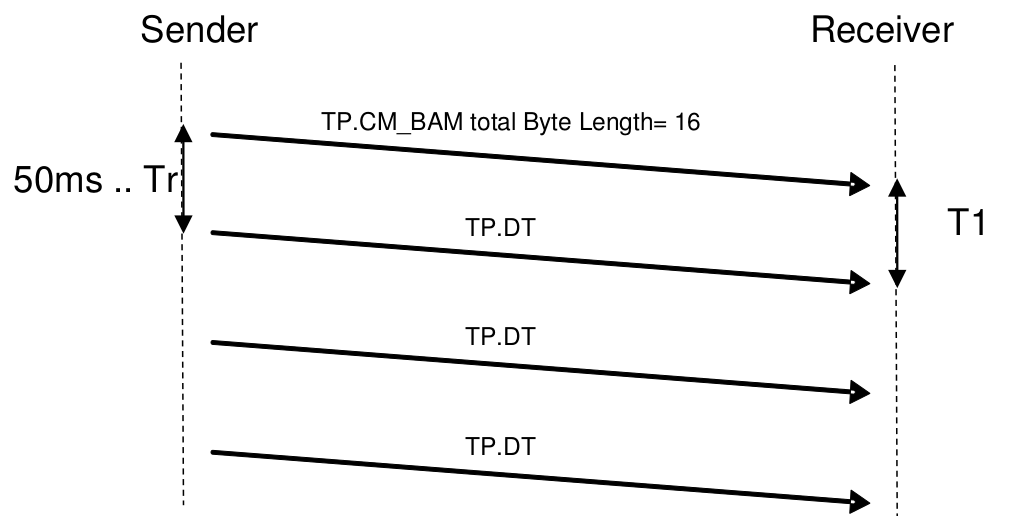
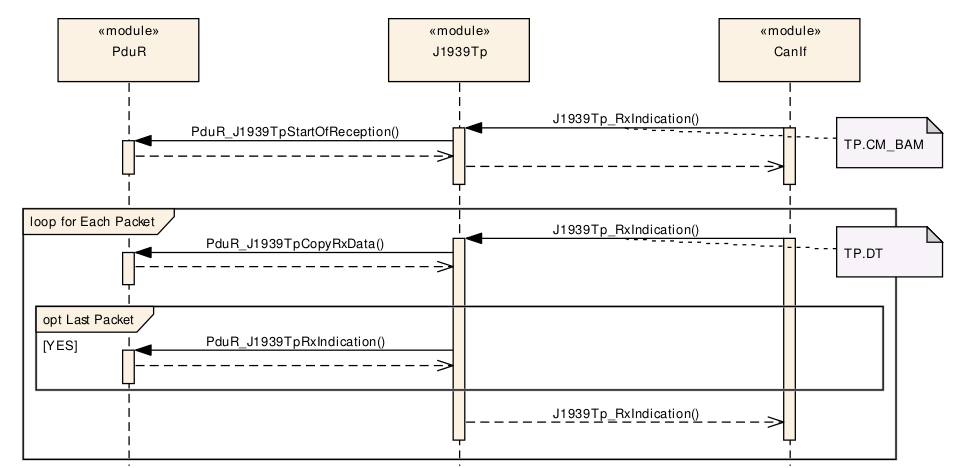
BAM
字节数大于8字节的数据传输方式之一就是BAM。BAM只有发送者向接收者的交互过程,第1帧数据是告诉接收者准备好开始接收,后面会逐个发送数据。第1帧包含PDU字节长度,数据帧个数,PGN(PGN1到3,分别是8位,PGN共24位)的信息。其作用是预先告诉接收者准备存储空间(有上界,具体见COM配置说明),防止接收者存储空间不足。以下是BAM通信过程,
-
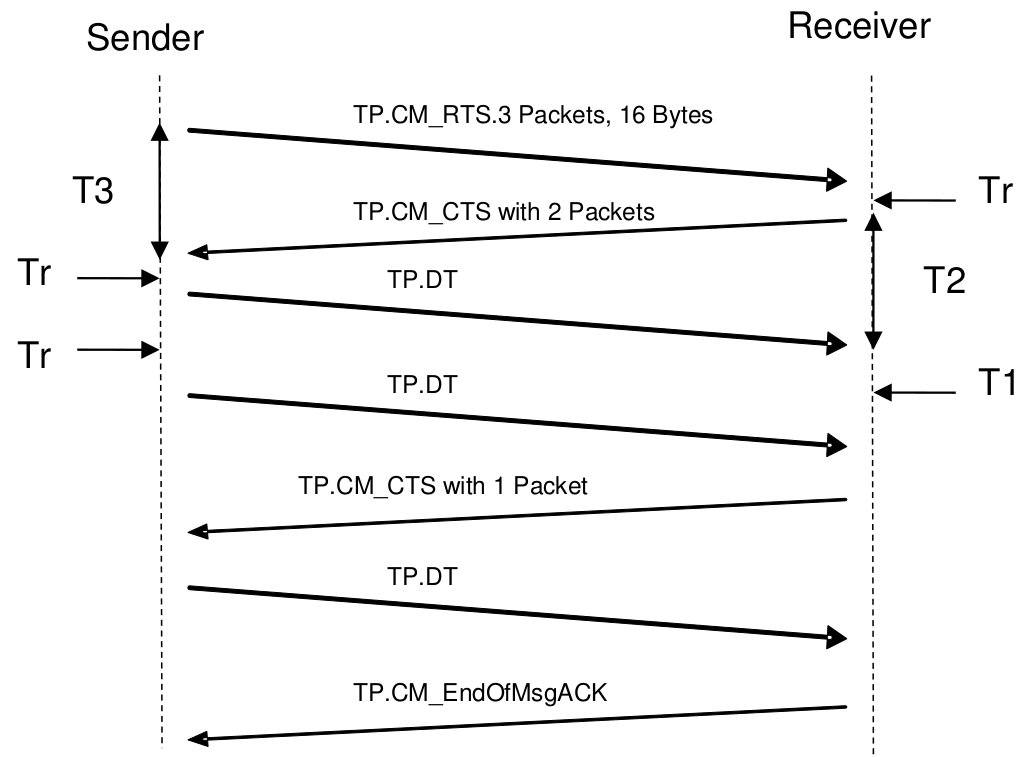
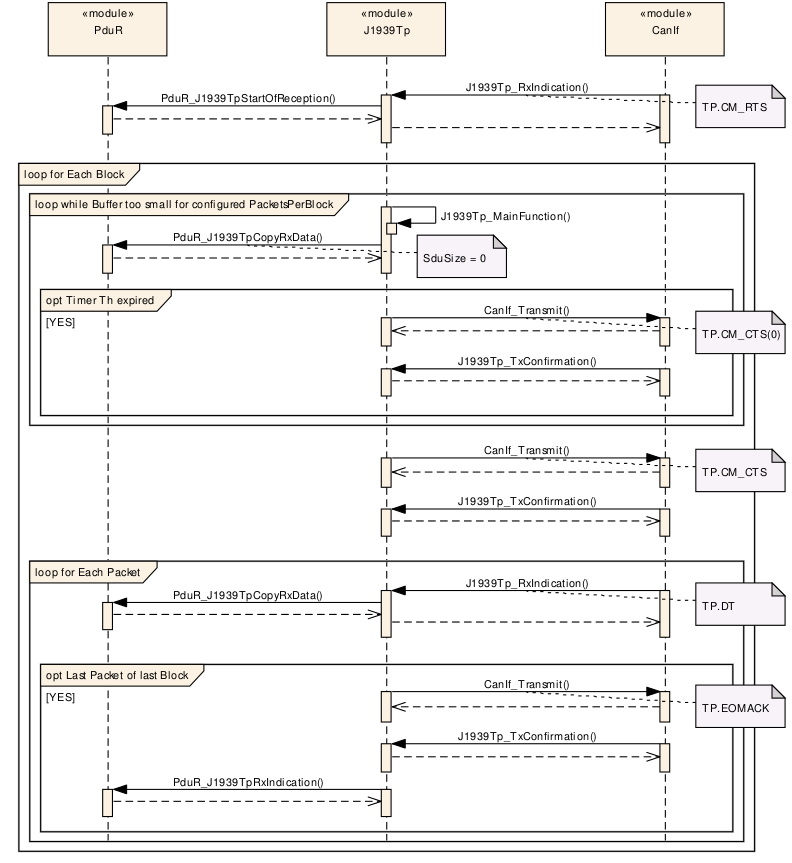
CMDT
另外一个大于8字节的数据传输方式是CMDT,这是一种需要接收者和发送者间进行交互的方式。
形象说明:
- CM_RTS:我有3个数据帧,共16字节数据
- CM_CTS:好的,你先发2个数据帧过来
- CM_DT:发送2次,共14个字节数据
- CM_CTS:再发1个过来
- CM_DT:发送1次,共2个字节数据
以下是上述通信过程中需要用到的数据帧格式,
RSV表示保留,数值是255
CM_RTS
byte: | 0 | 1 | 2 | 3 | 4 | 5 |...
data: |----------|----------|----------|----------|----------|----------|...
16 PDU字节长度 数据帧个数 PGN1 PGN2 PGN3
CM_CTS
byte: | 0 | 1 | 2 | 3 | 4 | 5 |...
data: |----------|----------|----------|----------|----------|----------|...
17 NumPackets NextPacketSeqNum RSV RSV PGN1 PGN2 PGN3
说明:NumPackets:发送者在下一个CTS发送之前,可以发送的数据帧个数
NextPacketSeqNum:下一个数据帧的序列号
CM_EndofMsgAck
byte: | 0 | 1 | 2 | 3 | 4 | 5 |...
data: |----------|----------|----------|----------|----------|----------|...
19 总数据长度 已收到DT数据帧个数 RSV PGN1 PGN2 PGN3
CM_BAM
byte: | 0 | 1 | 2 | 3 | 4 | 5 |...
data: |----------|----------|----------|----------|----------|----------|...
32 PDU字节长度 数据帧个数 RVS PGN1 PGN2 PGN3
CM_Abort
byte: | 0 | 1 | 2 | 3 | 4 | 5 |...
data: |----------|----------|----------|----------|----------|----------|...
255 原因 RSV RSV RSV PGN1 PGN2 PGN3
DT
byte: | 0 | 1 | 2 | 3 | 4 | 5 |...
data: |----------|----------|----------|----------|----------|----------|...
序列号 后面是7字节数据
3.2 J1939TP模块的实现举例
J1939TP对J1939进行了实现,以下是几个接收过程举例,更加详细的过程见AUTOSAR_SWS_SAEJ1939TransportLayer.pdf。
-
DIRECT
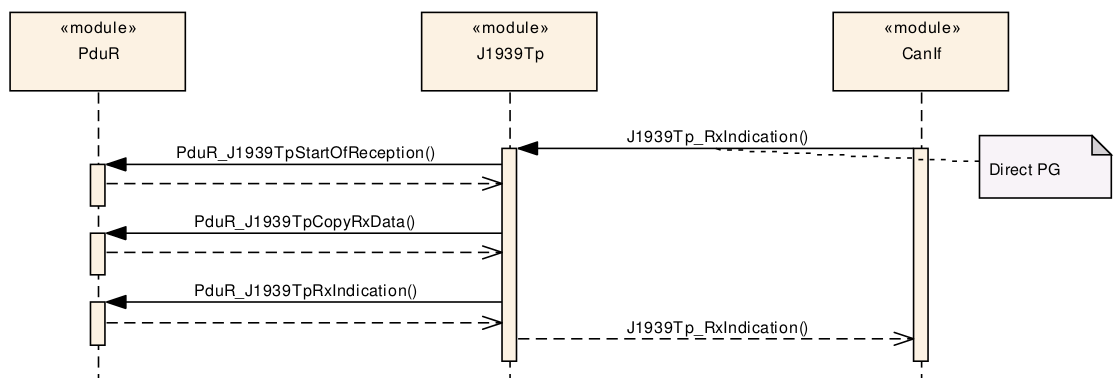
PduR_J1939TpStartOfReception @ PduR_Logic.c实现了COM模块的Buffer请求。 -
BAM广播
-
CMDT点对点通信
3.3 J1939TP模块概念理解
-
Channels、PGs和Relations
J1939TP顶层的配置结构体是
J1939Tp_ConfigType,如下typedef struct { const J1939Tp_RxPduInfoRelationsType* RxPduRelations; const J1939Tp_ChannelType* Channels; const J1939Tp_PgType* Pgs; } J1939Tp_ConfigType;RxPduRelations可以对应到每个PDU ID,也就是说,在发送、接收的时候,都是索引到某一个RxPduRelations,然后再发送出去。Channels对应到DA(目的地址)和SA(源地址)相同的所有PDU(无MetaData)。Pgs对应不同的参数组,一个Channel(也就是相同的发送者和接收者)中可以有多个PG。 -
基于CMDT的数据收发过程
(1)Sender send RTS, Receiver receive RTS Receiver: 1.根据CAN IF模块的索引,找到Relaitions[i] 2.Relaitions[i]对应到多个RxPdus,进行逐个遍历,具体为CM(连接管理)、DT(数据传输)、DIRECT(直接数据传输)等,而且RxPdus每个都会配置对应到哪个Channel 3.因为是RTS,所以索引到CM时,就可以对应 4.在CM对应的处理函数中,取出RTS数据域中的PGN(Byte[5:7]) 5.根据上述PGN遍历Channel中的PGs,找到对应的PG 6.J1939TP管理的ChannelInfoPtr结构体变量(每个Channel都会有一个对应的)进行初始化,准备开始接受,具体包括已接收DT数据帧个数、剩下需要接收的DT数据帧个数、总数据字节个数、currentPgPtr等 7.请求COM准备Buffer,如果有错误就会断开此次连接,否则进行下面 8.开始计时器,发送CTS(会指定到下次发送CTS前,可以发送多少帧DT) (2)Receiver send CTS, Sender receive CTS Sender: 1.根据CTS设置的发送数据帧个数,来逐个发送DT数据帧
欢迎关注我的微信公众号
互联网矿工
